At Harvey Mudd, the General Engineering major is highly robust. Our program consists of three main approaches to tackling Engineering: Systems, Sciences, and Design. The Systems appraoch focuses on how to apply mathematically model general system outputs and functions of their input. The Sciences are intended to give a broad education in engineering, where students explore Chemical and Thermal Processes, Mechanics, Electronic and Magnet Circuits, Computer Architecture, and Material Science. Lastly, the Design field teaches Professional skills necessary to apply theory learned in class. These skills include, teamwork, communication, project management, and design and prototyping. During my time at Mudd, I’ve worked on a variety of interesting projects to complete practical tasks. Below, I’ve listed a few of my favorite Engineering class projects.
By clicking the buttons below, learn more about the What, How, and Results of each project.
E4: Design & Manufacturing
Machinist Hammer
Overview: Manufactured a functional machinist hammer from clear oak, AISI 1015 & 4340 steel, and nylon, following strict technical specifications. The experience inspired me to become a Harvey Mudd Machine Shop proctor.
Crafted a functional machinist hammer from oak, steel, and nylon, adhering to precise GD&T specifications.
Contributed to the Harvey Mudd College tradition of student-made hammers while developing hands-on machining skills.
How?
Machined head stock to length using lathe and milling operations and verified with digital micrometers.
Heat treated hardface, verified HRC Hardness for durability, and sandblasted for smooth finish.
Results
Delivered a high-quality, durable machinist hammer that scored near perfect in quality of manufacturing.
Became a Machine Shop proctor, training and mentoring new students to ensure shop safety.
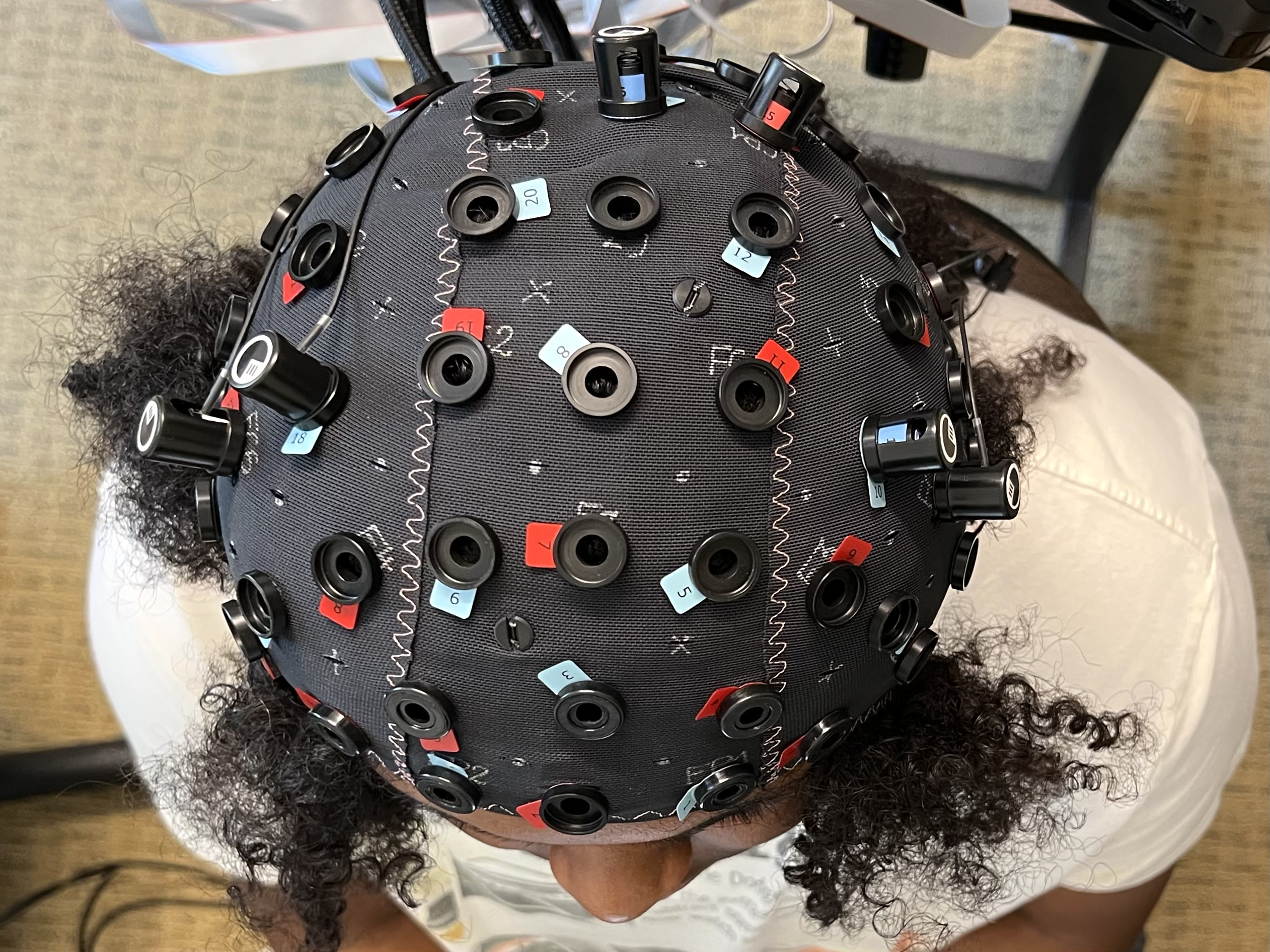
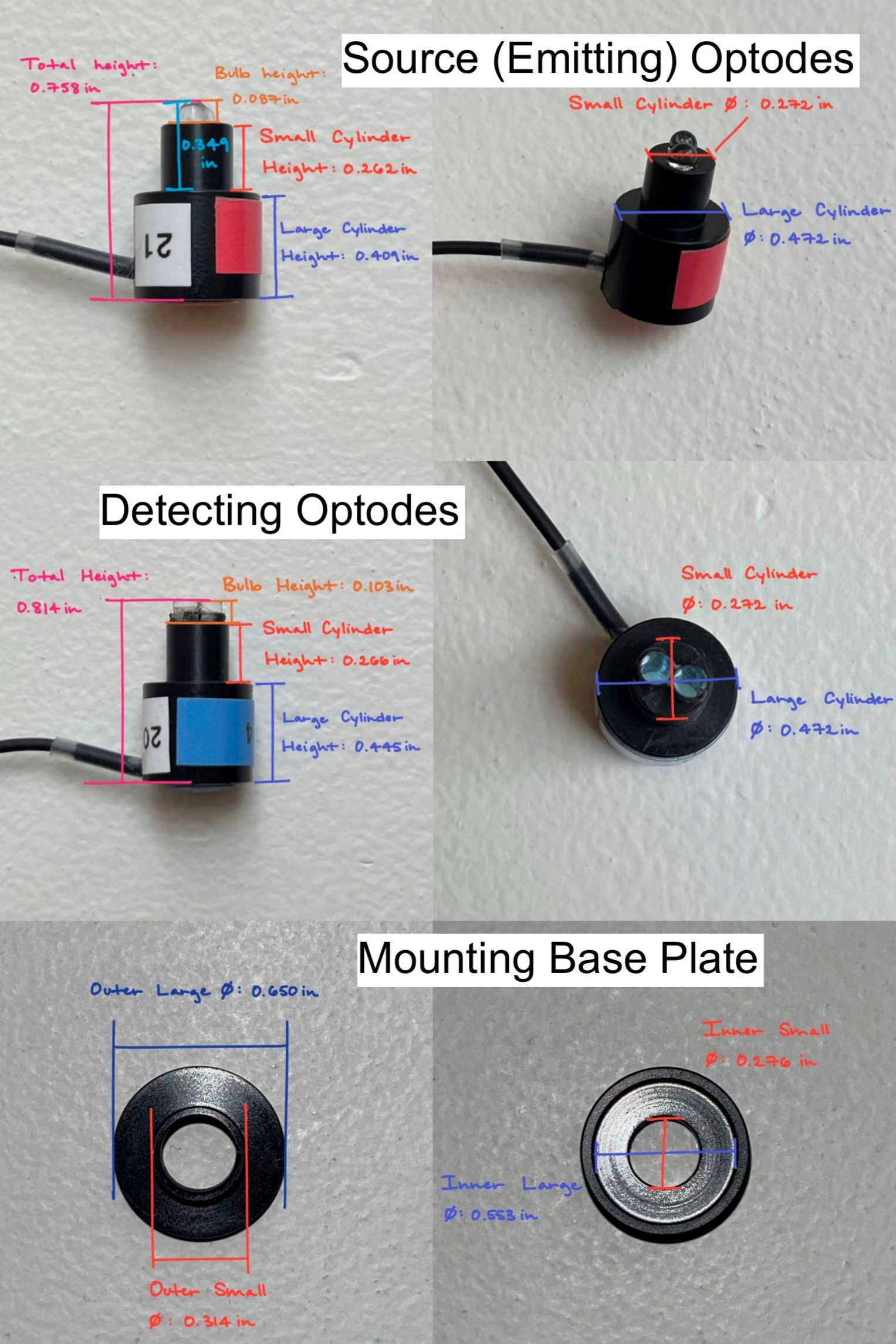
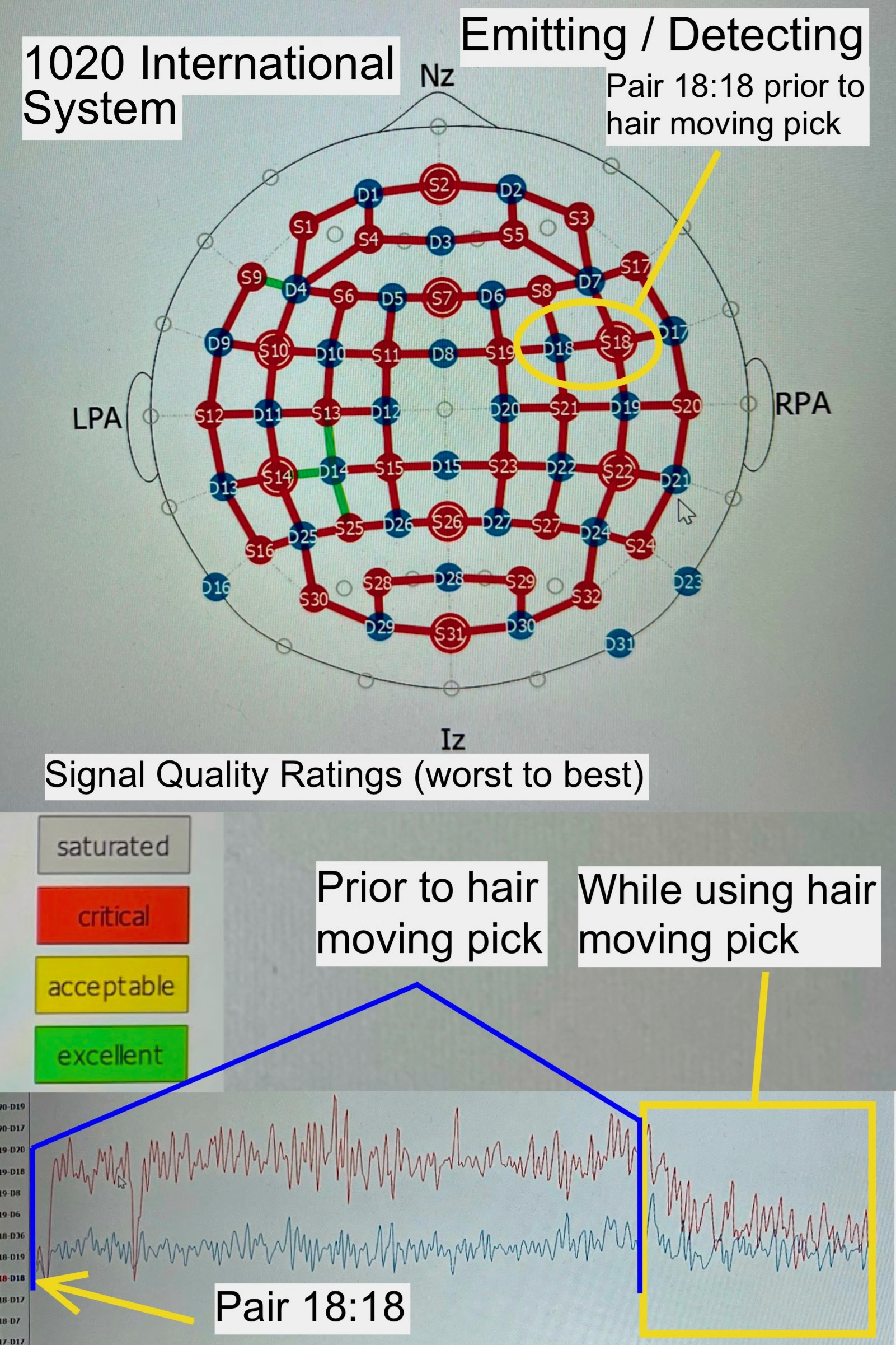
Optimizing Neuroimaging Device
Overview: Developed three mechanisms to improve Functional Near-Infrared Spectroscopy (fNIRS) infrared (IR) light delivery to the scalp, addressing signal loss from thick or dark hair.
Skills: Project & Design Management, Client Communication
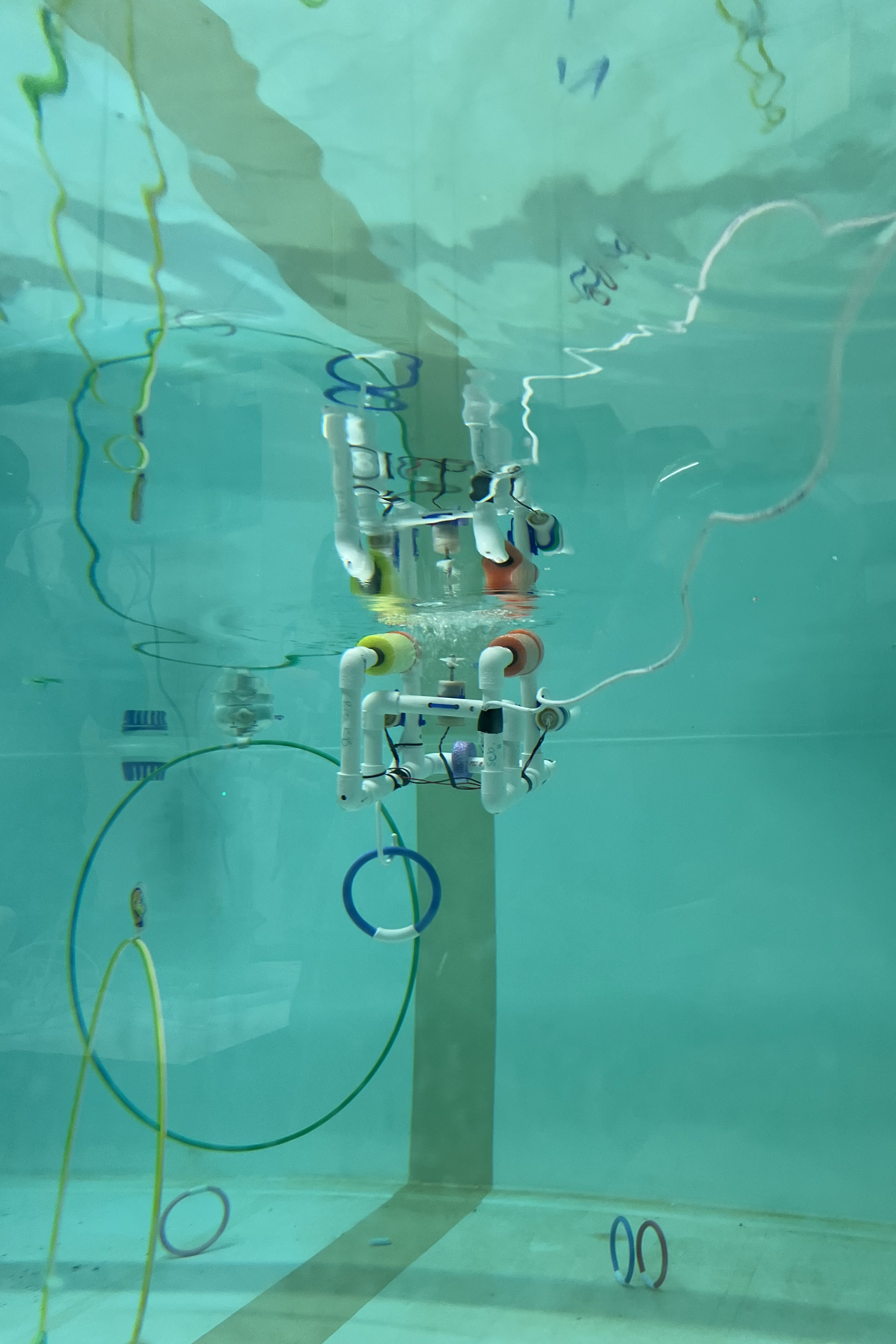
Created a fully waterproof ROV to measure temperature across varying depths.
Implemented P control for motor operation.
How?
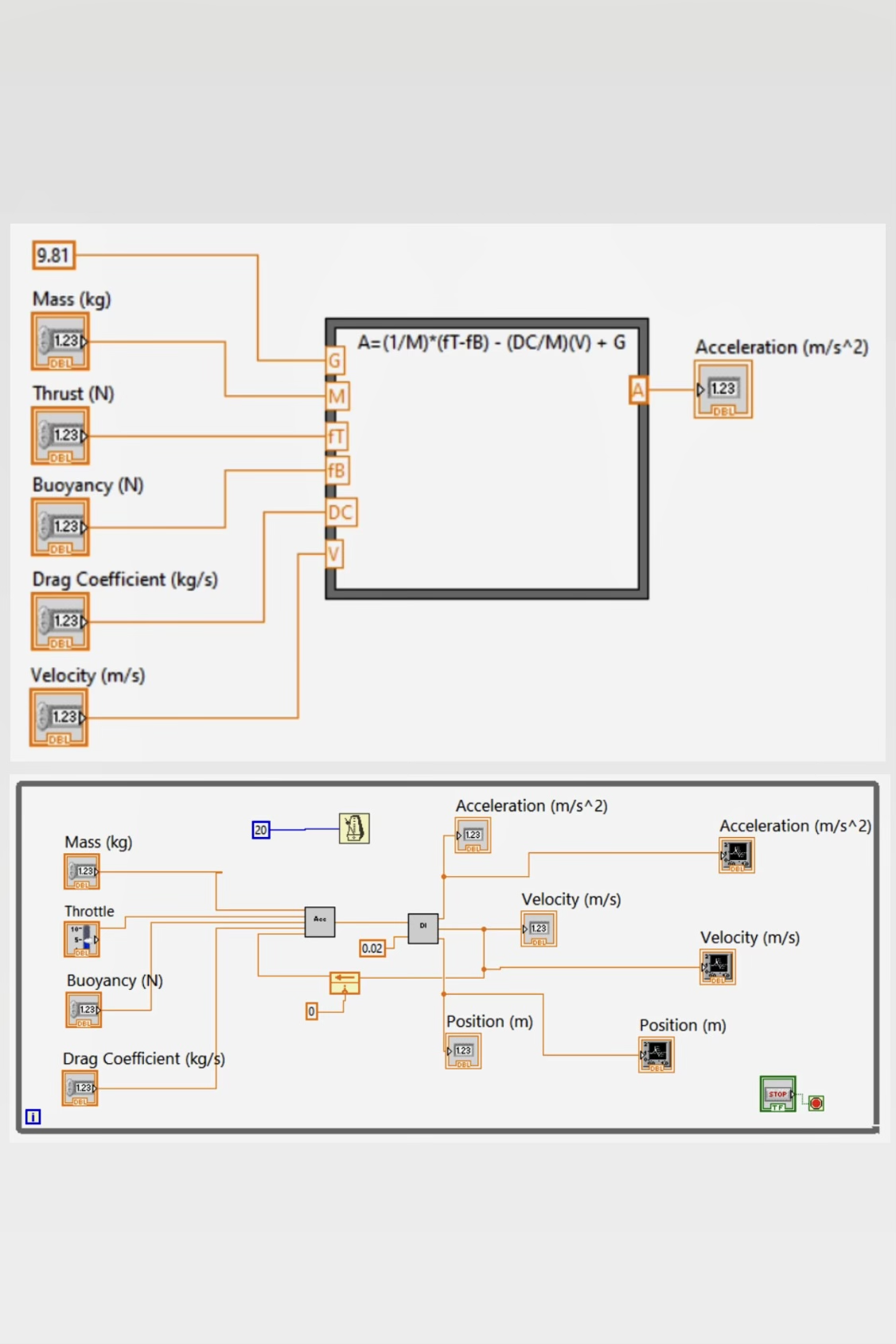
Modeled and simulated vertical motion of the ROV by changing the motor PWM duty cycle in LabVIEW.
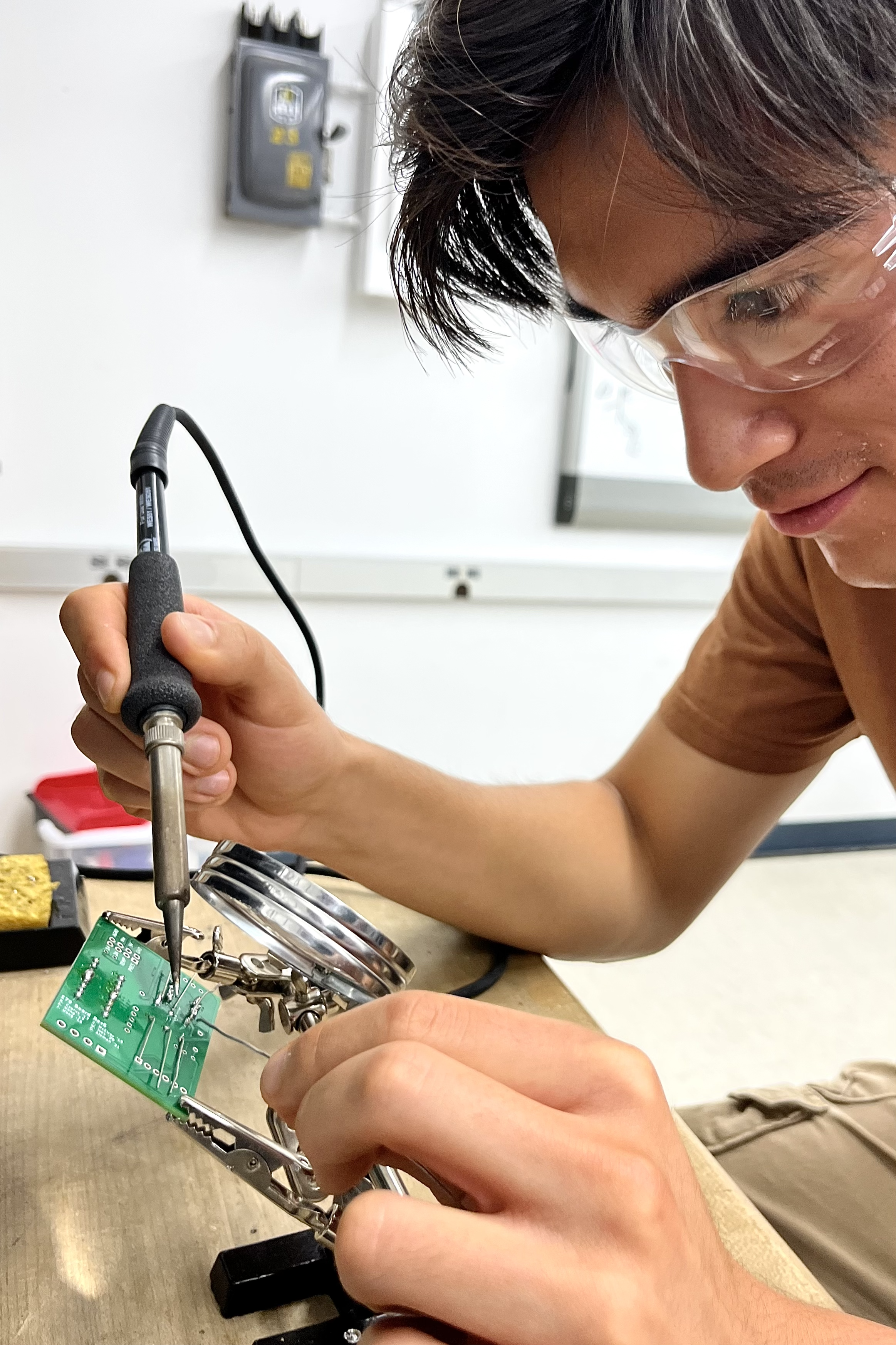
Soldered MPX5700 pressure sensor and NXFT15XH103 thermistor circuits to the project PCB.
Results
Deployed ROV in a real-world application and collected reasonable environmental data.
Gained hands-on experience in circuit breadboarding, soldering, and oscilloscope use.
E80: Experimental Engineering
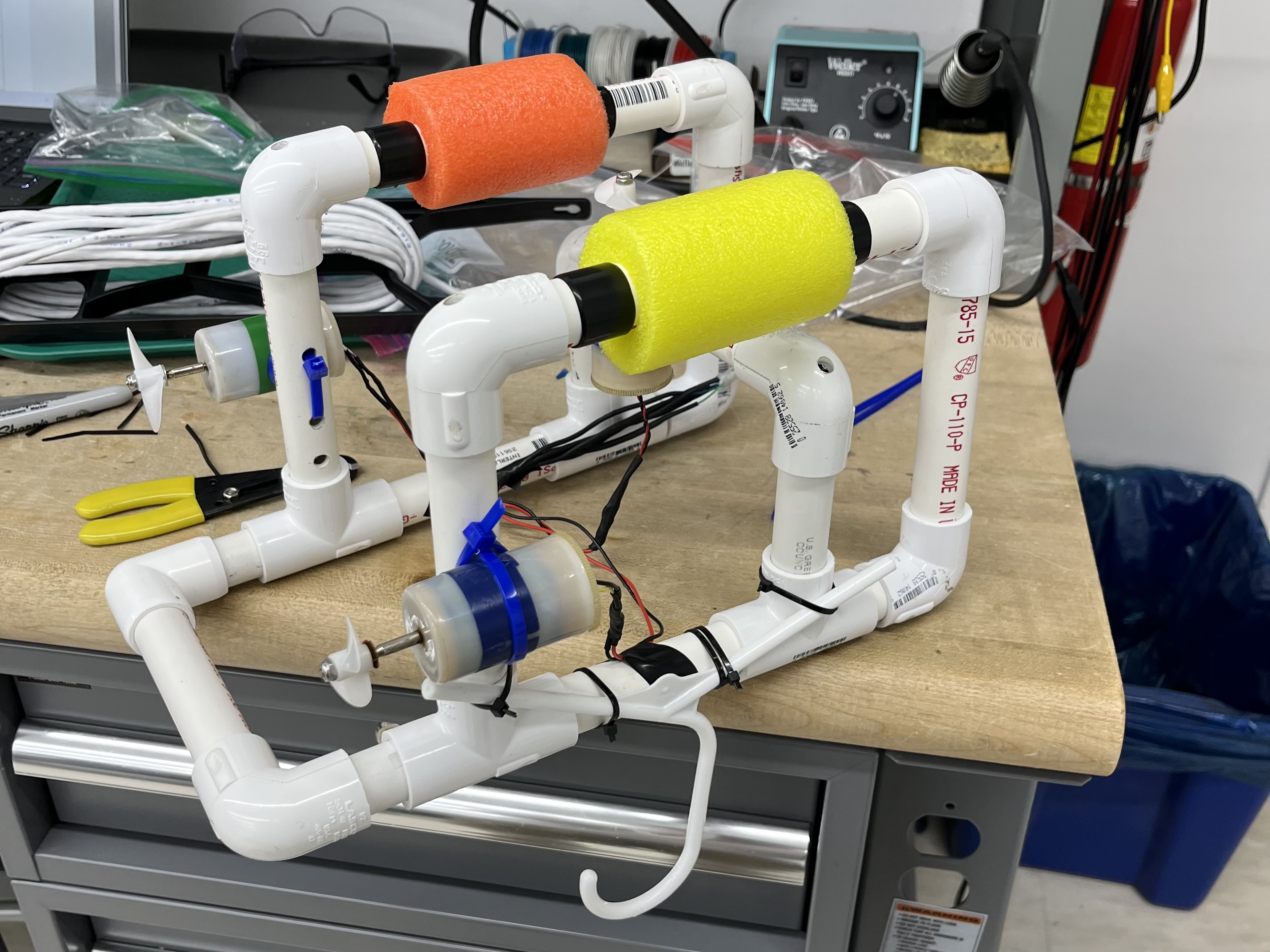
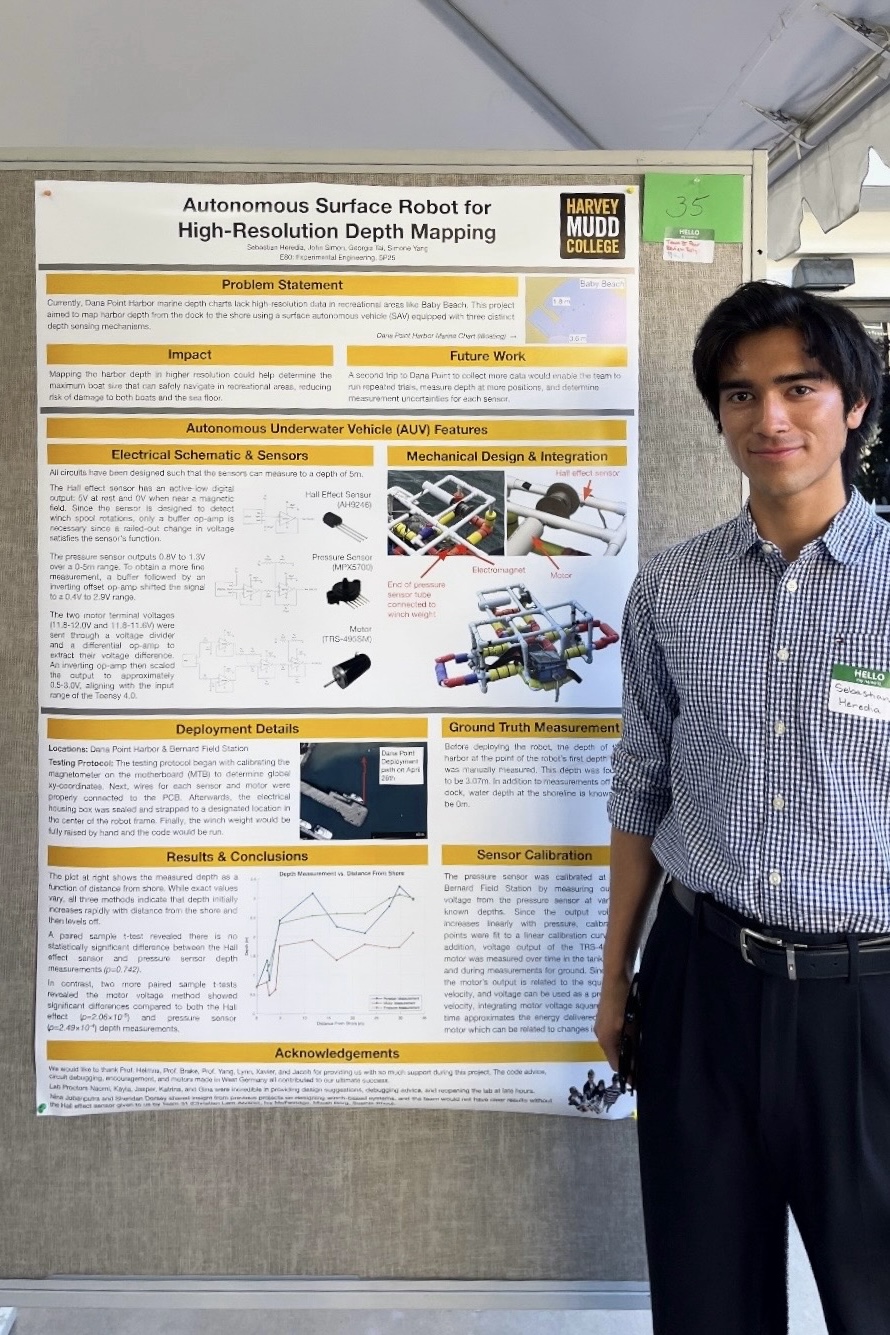
Autonomous Surface Vehicle (ASV)
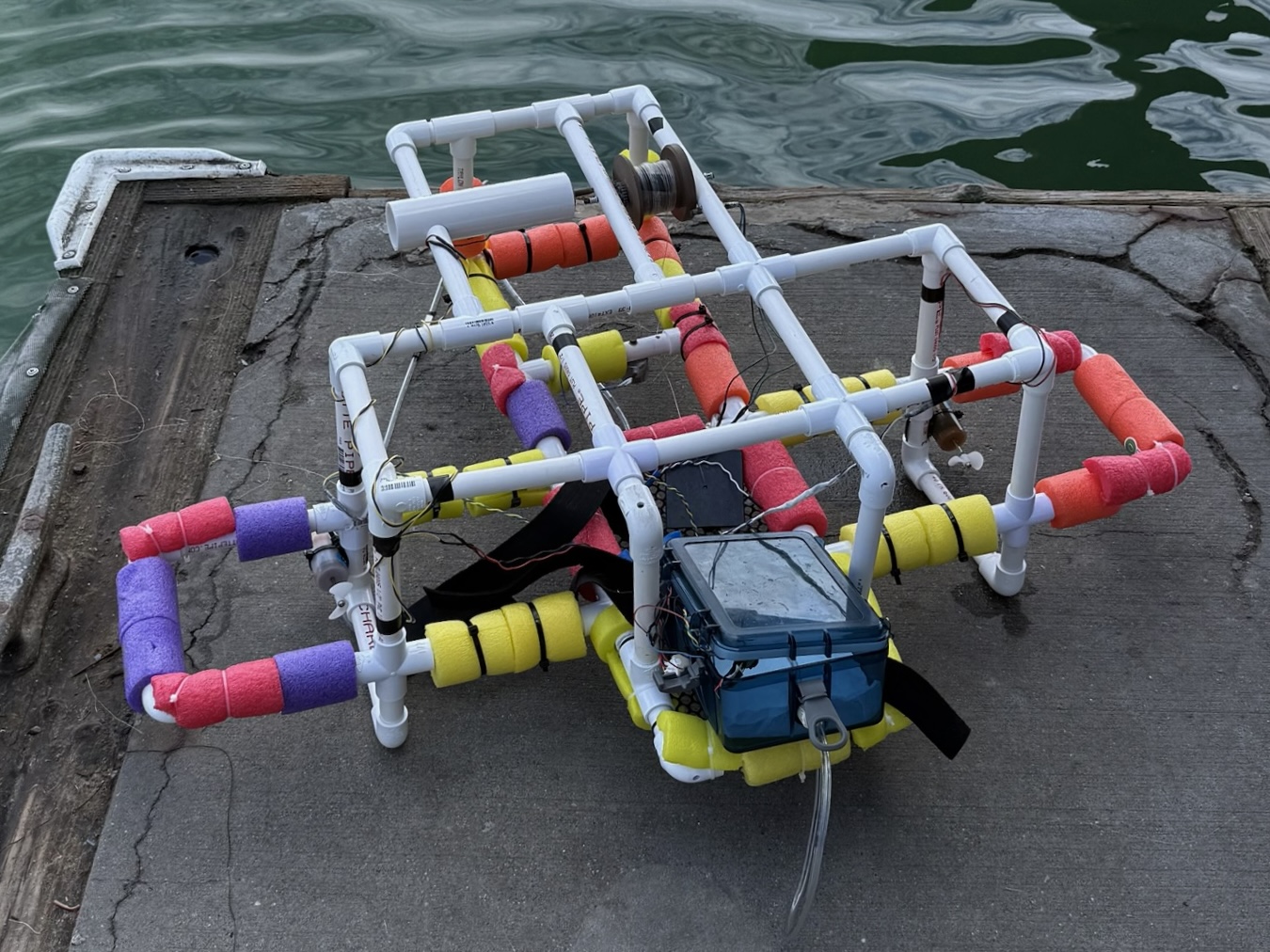
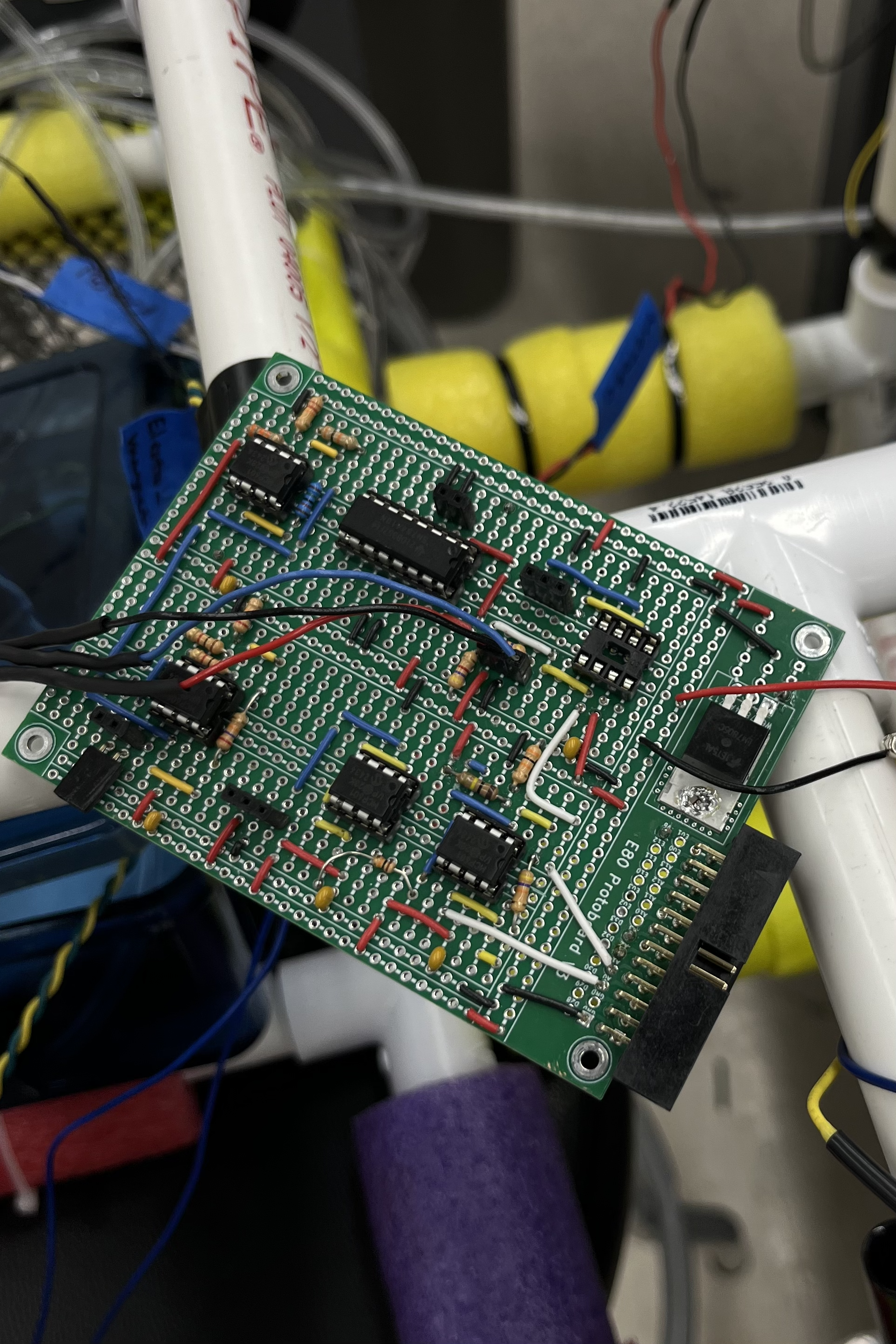
Overview: Designed and deployed an Autonomous Surface Vehicle (ASV) to map water depth at Baby Beach, Dana Point Harbor, CA using mechanical, electrical, and pressure-based sensing techniques.
Skills: Arduino, MATLAB, Power Tools, BOM, 3D-Printing
Measured underwater depth using three complementary sensing methods:
Hall effect sensor embedded in a 3D-printed winch and spool for mechanical depth measurement.
Pressure sensor calibrated for direct depth readings.
Motor-based voltage integration to estimate depth during retrieval.
How?
Designed and created a lightweight, buoyant ASV frame using power tools.
Waterproofed electronics housing container using epoxy and Parafilm.
Iterated Arduino code on the Teensy 4.0 microcontroller in order to interface components.
Performed magnetometer calibration on the ASV’s IMU.
Results
Gained experience with the fast-pace reality of product development in a real-world environment.
Learned how to effectively manage a project and adhere to time and budget constraints.
Validated the effectiveness of low-cost ($50 budget), multi-sensor ASVs for generating high-resolution shore plots.
E85: Digital Electronics & Comp. Architecture (RISC-V)
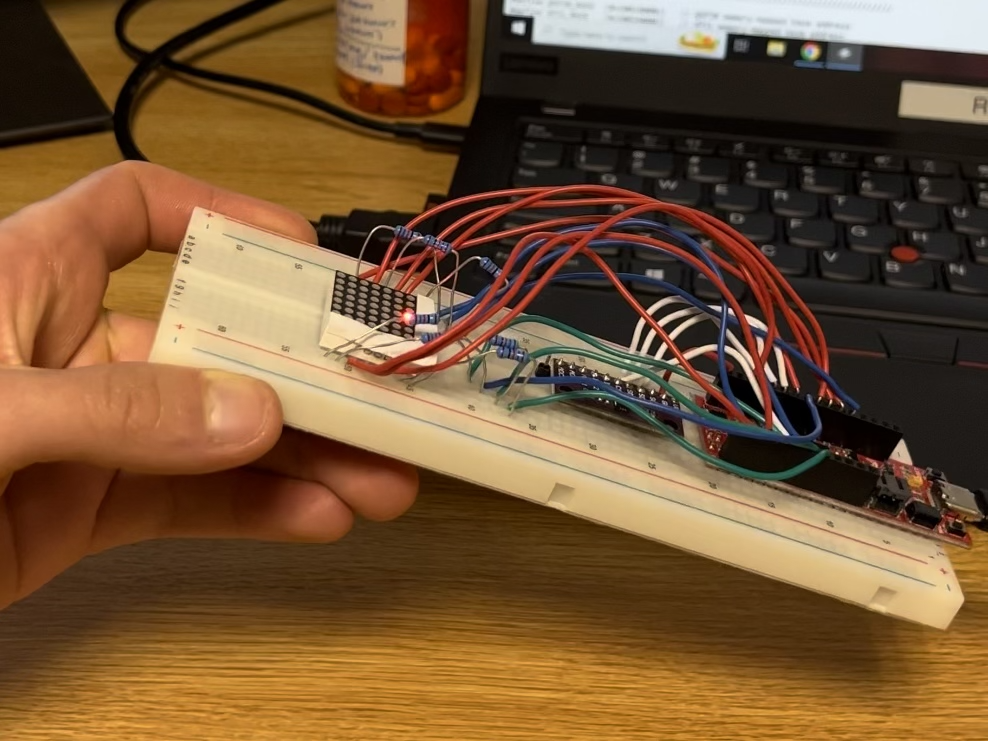
2D-Digital Level
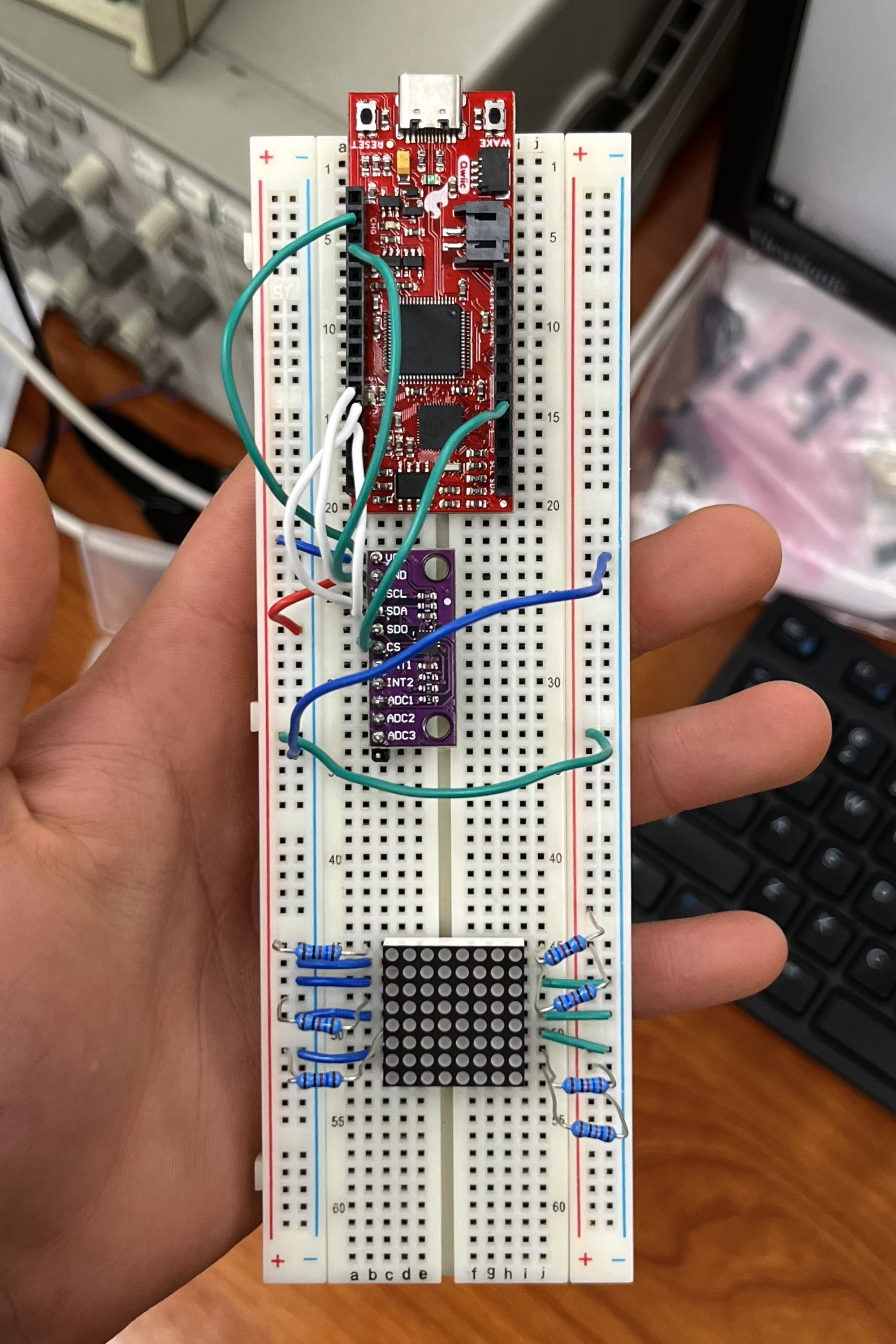
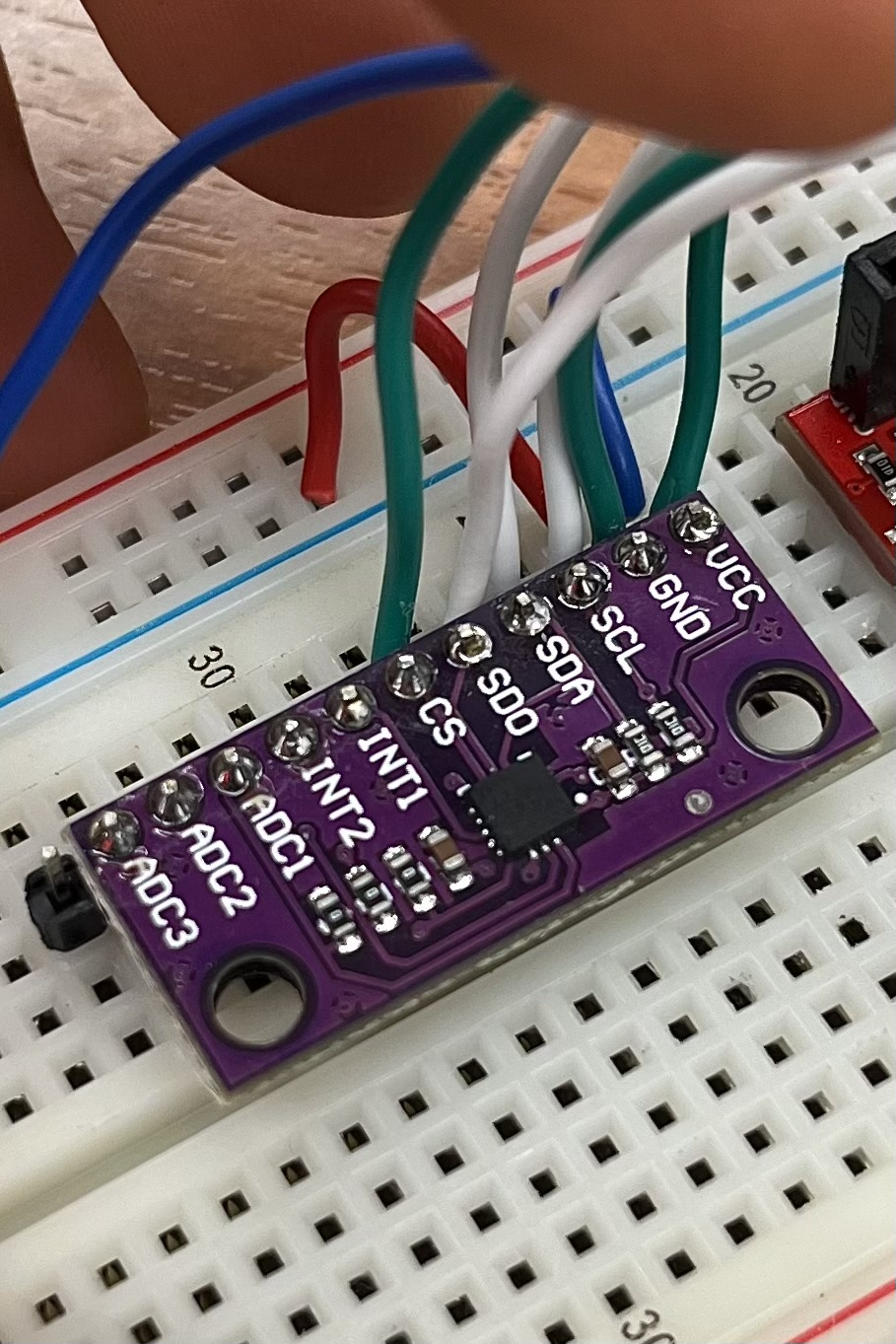
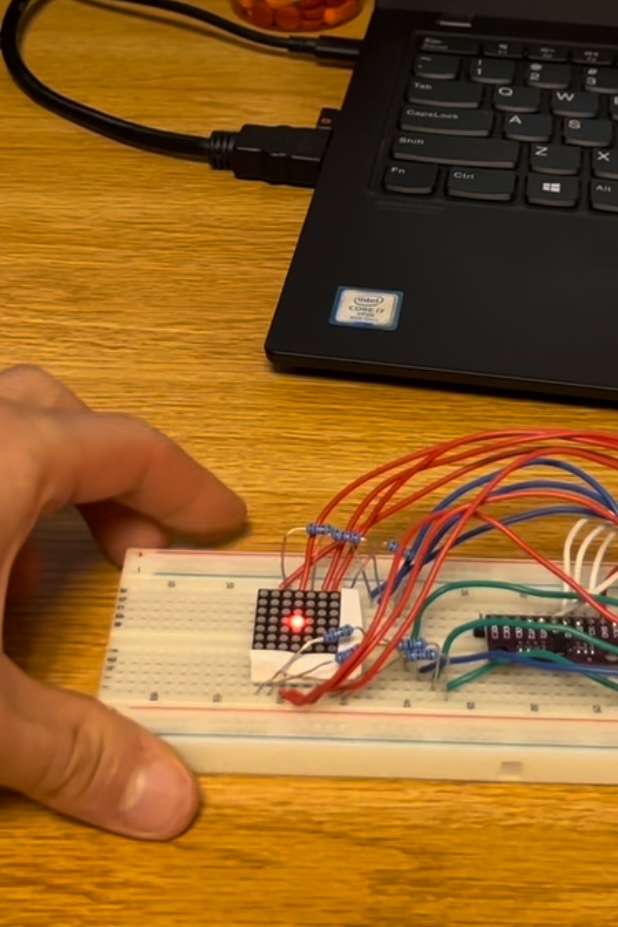
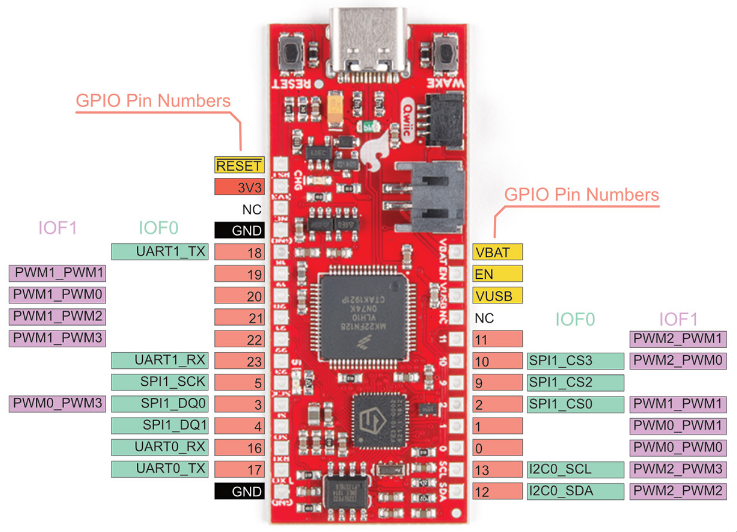
Overview: Built a 2D-digital level using a microcontroller, a 7x7 LED matrix, and a triple-axis accelerometer with SPI communication. Gained experince with embedded software and signal processing in real-time.
Created a digital level that maps tilt angles from a triple-axis accelerometer to a 7x7 LED matrix “bubble” display.
Bubble motion indicated surface tilt in X and Y axes, stopping at matrix edges for extreme angles.
How?
Programmed a RED-V ThingPlus microcontroller in C using SPI communication to interface with the accelerometer.
Implemented real-time signal processing and calibration to ensure smooth, flicker-free bubble motion across the display.
Results
Achieved accurate, smooth, and reliable bubble display, validating full end-to-end embeded system integration.
Designed a sensitive and practical 2D-digital tool with immediate real-world use.
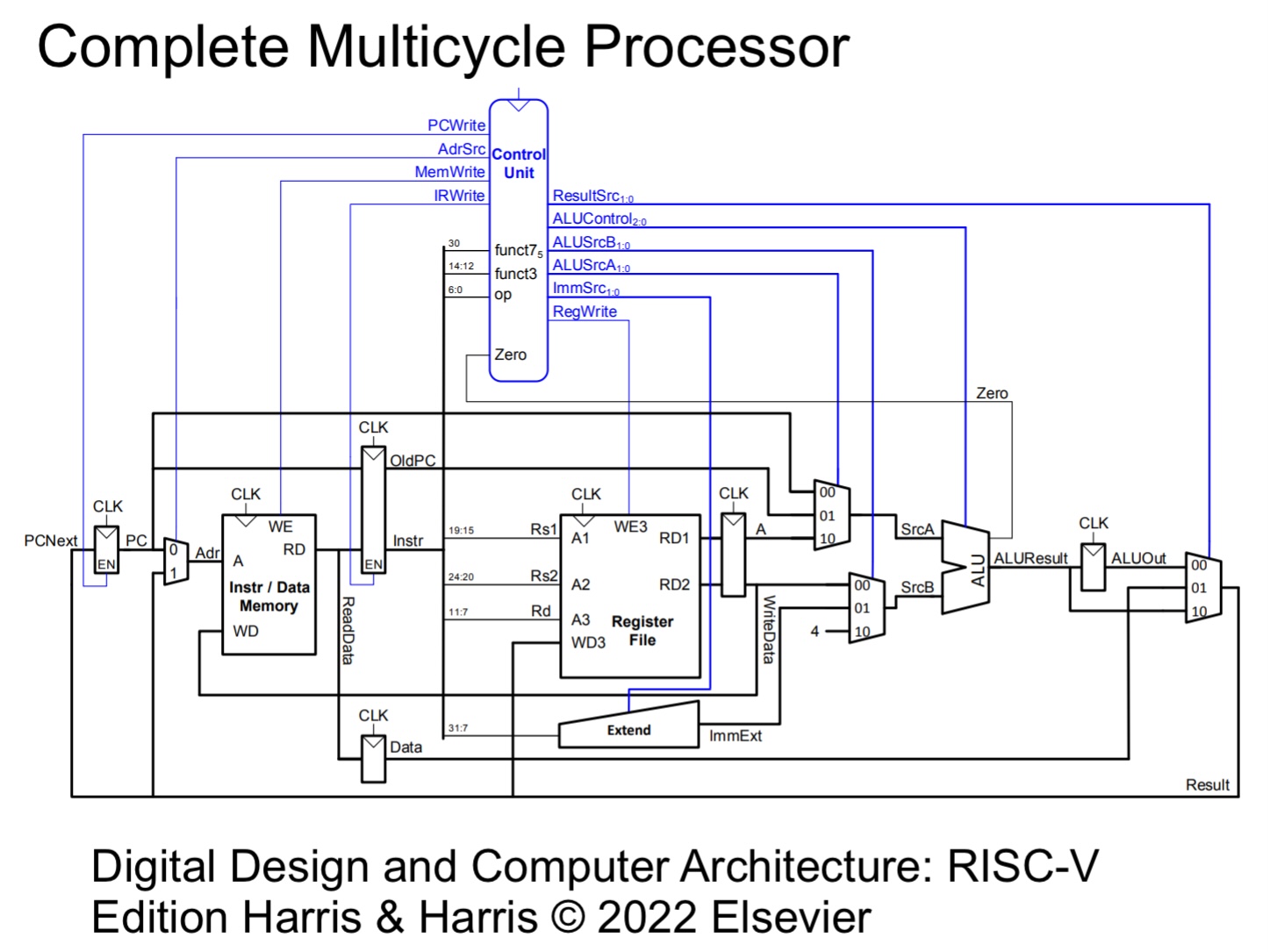
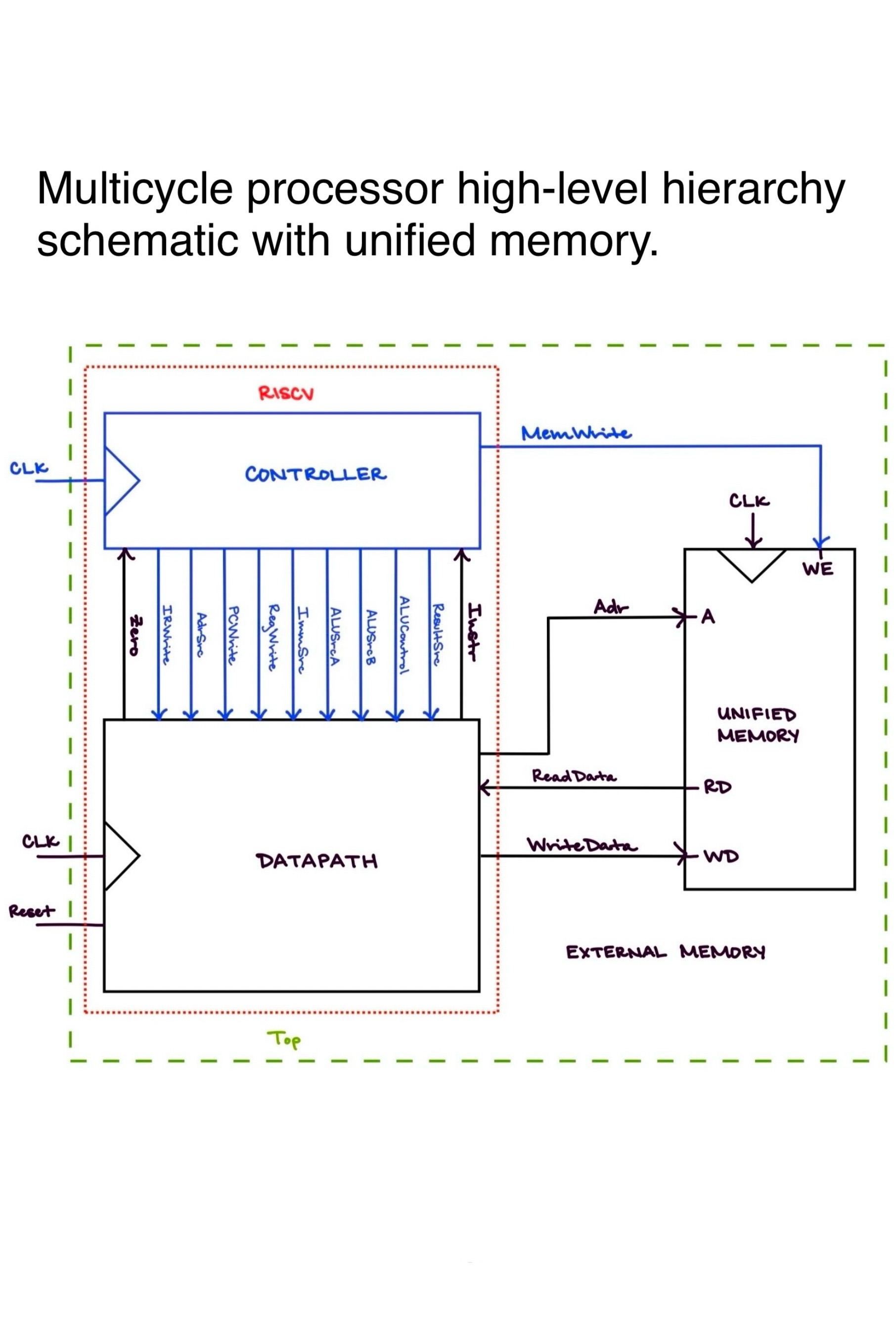
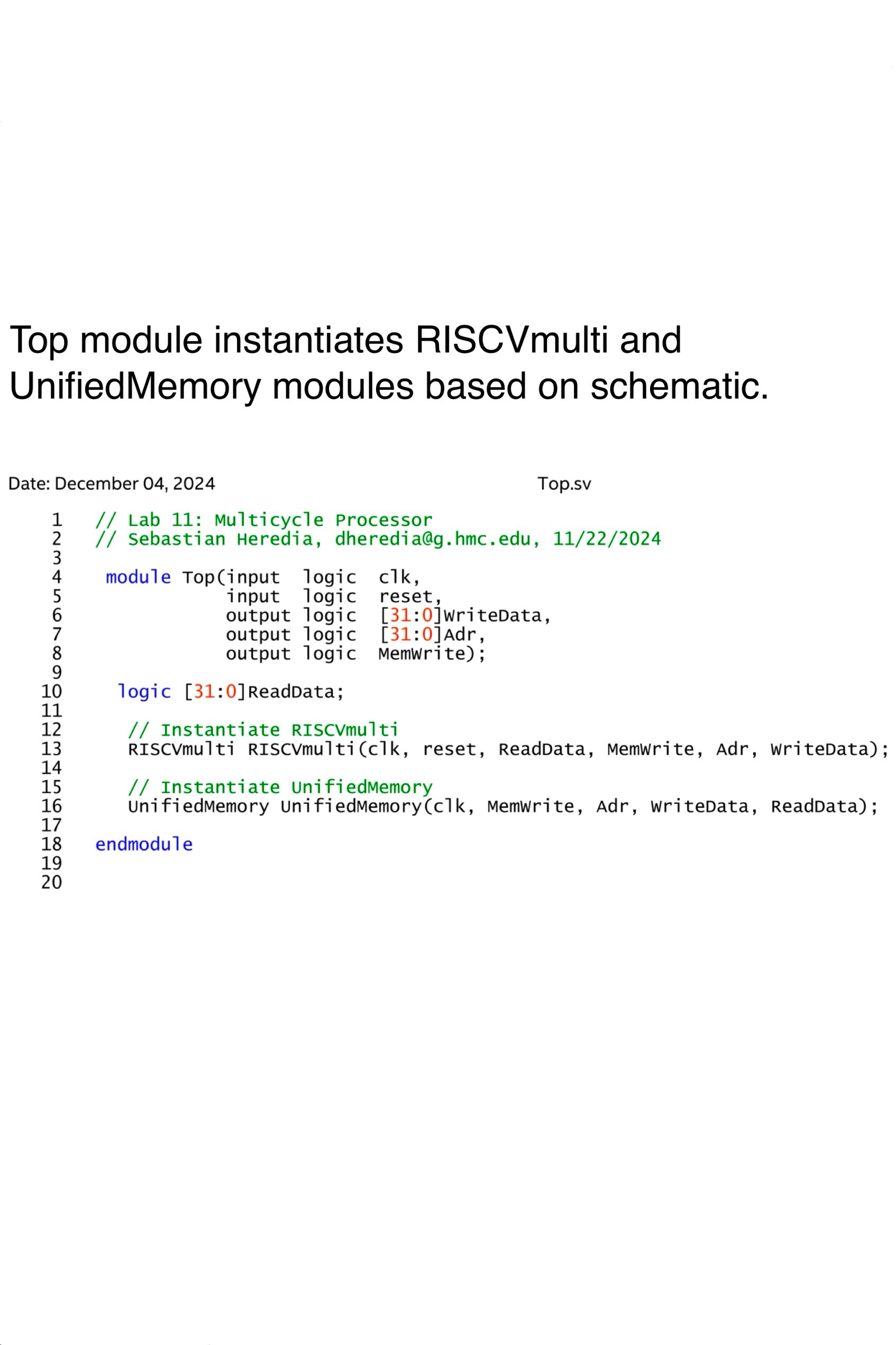
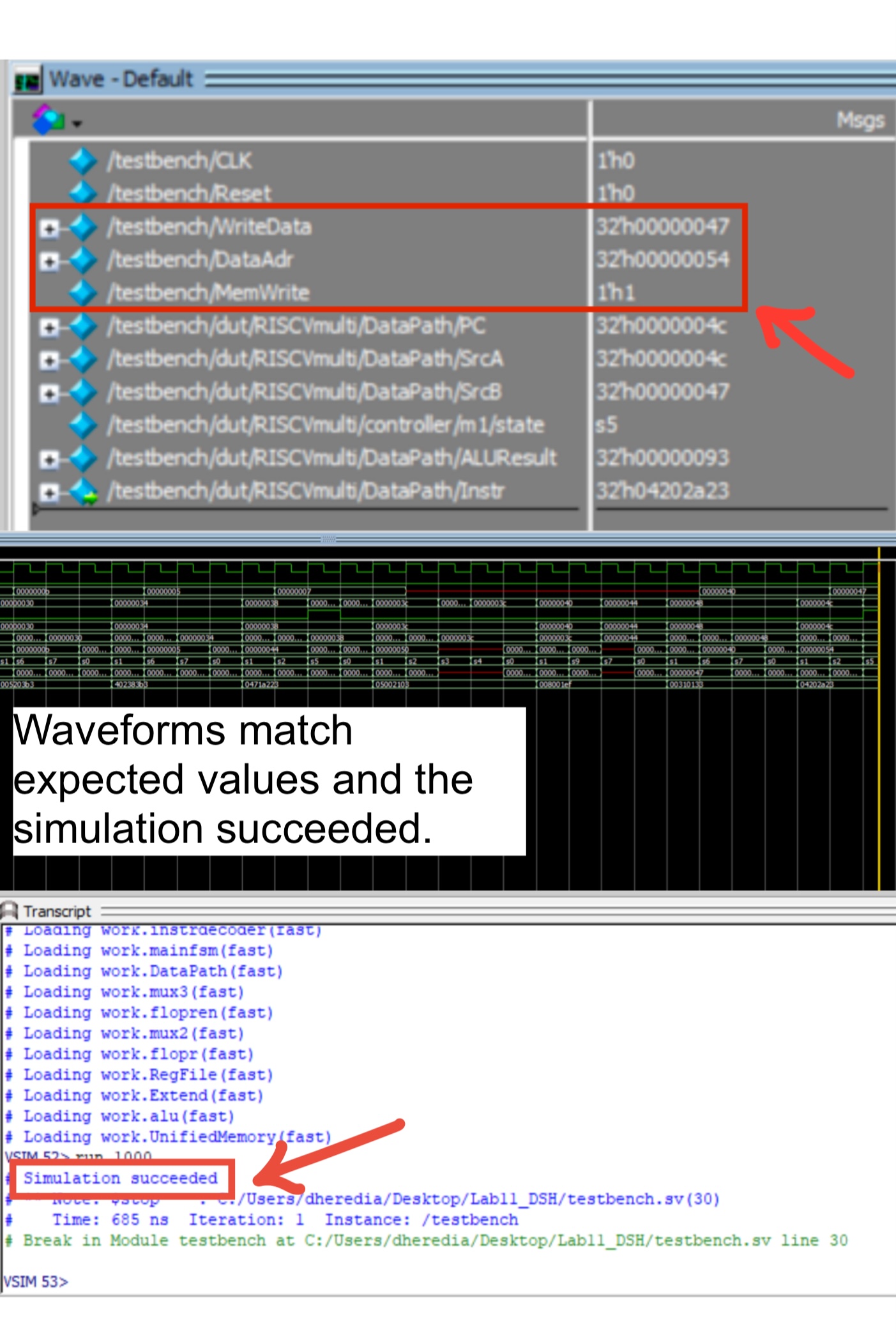
32-Bit Multicycle Processor
Overview: Designed and implemented a 32-bit RISC-V multicycle processor in SystemVerilog usign Quartus and Questa. Developed experience in digital design, datapath and control logic, and modular architecture.
Skills: SystemVerilog, HDL, Assembly, Machine Language, RISC-V, Quartus FPGA, Questa






{kind=link}